Active Disturbance Rejection Formation Control for Multiagent Systems with Input Constraints
Ipca 2024/03/08

新闻速递
倪洪杰教授、张文安教授的博士生顾曹源在IEEE 《Transactions On Control Of Network Systems》发表论文。 该论文研究了多代理系统(MAS)在扰动和输入约束条件下的编队控制,提出了一种基于分布式观测的主动扰动抑制编队控制(ADRFC)方法。 首先,利用分布式中间估计器(DIE)估计跟踪误差系统的状态和扰动;其次,提出了一种改进的分布式模型预测控制(IDMPC),以实现多代理系统在扰动和输入约束条件下的编队控制;然后,结合DIE和IDMPC设计了鲁棒ADRFC方法,并分析了整个系统的稳定性。然后,结合 DIE 和 IDMPC 设计了鲁棒 ADRFC 方法,并分析了整个系统的稳定性。最后,在由四个移动机器人组成的 MAS 上进行了实验,以说明所提方法的有效性和优越性。
论文介绍
近年来,多智能体系统因其在智能检测、物流运输、灾难救援等领域的广泛应用而受到越来越多的关注。编队控制任务作为多智能体系统的主要应用之一,已经形成了多种编队控制方法,如基于领导者-追随者的方法、基于虚拟结构的方法、基于行为的方法等。另一方面,由于建模的不确定性、部件的老化和磨损、环境噪声等诸多因素造成的干扰是多智能体编队控制任务中的另一个棘手问题。任何一个智能体的干扰都可能通过通信拓扑扩散到整个系统,从而严重恶化系统性能,甚至破坏多智能体系统的稳定性。考虑到硬件设备的性能和安全性,实际的多智能体系统通常存在控制输入约束,这导致上述一些方法无法在实际设备中应用。同时,这些方法的稳定性证明较为简单,并没有详细分析DMPC的终端约束集和终端惩罚矩阵,并且现有方法的编队控制和扰动抑制本质上是两个独立的部分,这降低了系统的控制性能。因此,如何将编队控制和干扰抑制技术进行有机结合,以解决具有输入约束和干扰的多智能体系统的编队控制任务,是一个具有实际意义的问题。
以该问题为导向,本文提出了两种创新方法:
(1)与标称DIE相比,在保证DIE估计性能的前提下,设计了一种观测器增益最小化策略。避免了在 IDMPC 预测方程中加入修正项后,由于观测器增益过大而导致控制器振荡的现象。
(2)提出了一种 IDMPC 策略来处理 MAS 实际执行器的输入约束问题。通过最大化终端约束集和最小化终端惩罚矩阵,得到一个合适的自抗扰编队控制器,从而有效地完成路径跟踪和编队同步任务。
自抗扰编队控制器(ADRFC)设计是解决具有输入约束和干扰的多智能体系统的编队控制的任务关键,在离线阶段给出部分初始参数,并计算出终端控制器增益、DIE 观察器增益、终端约束集和终端惩罚矩阵。然后,将移动机器人放置在实验场地开始运行,算法首先通过 DIE 获得对跟踪误差状态和扰动的估计,然后通过 IDMPC 获得一组控制律。 接着,使用纳什优化策略不断优化控制律,直到前后控制律误差在所需范围内。最后,对每个移动机器人的最终控制法则进行反求解并应用于机器人,从而实现主动干扰抑制编队控制。
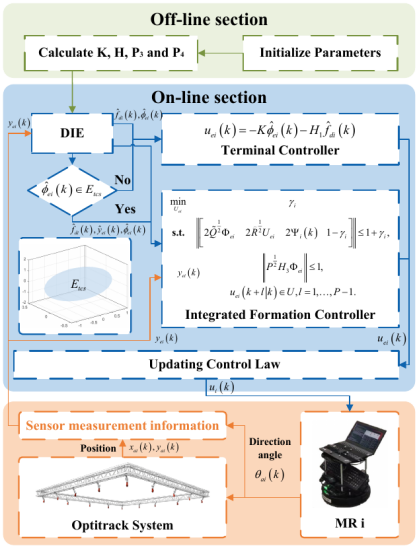
图1:ADRFC算法流程框图
为了充分展示所提方法ADRFC的有效性和优势,ADRFC方法下移动机器人的轨迹图如下所示,结果表明四个移动机器人能够准确地跟踪虚拟移动机器人产生的轨迹,并形成理想的队形。此外,由于干扰发生在磁共振的方向角上,因此给出了误差状态的曲线及其估计结果。结果表明,经过短时间的振荡后,ADRFC 能够准确地估计出每台移动机器人的误差状态并确保其收敛,从而使移动机器人完成相应的路径跟踪任务。此外,所提出的 ADRFC 可以获得精确的干扰估计结果并自动调整,从而使 MR 的误差状态快速恢复。
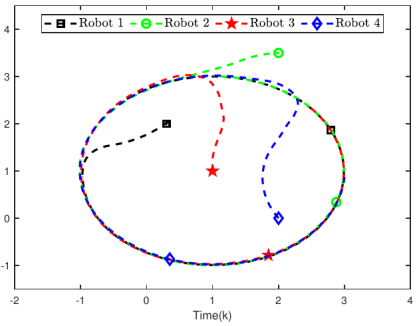
图2:移动机器人轨迹图
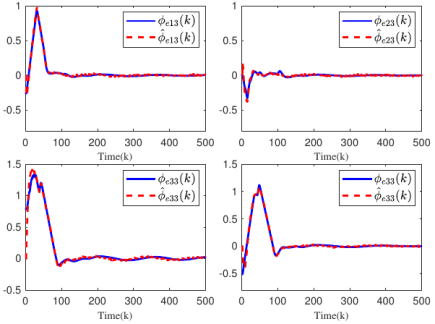
图3:误差状态曲线及其估计结果
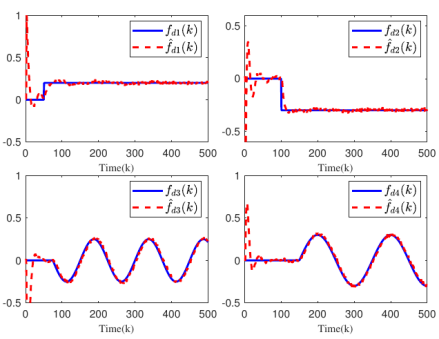
图4:干扰及其估计结果
下图显示了七种方法的编队误差Ef的比较结果,并表1中列出了七种方法的具体性能。可以看出,在所有方法中,ADRFC 的瞬态和稳态性能最好,收敛步长约为 92 步,其瞬态和稳态峰值分别只有 1.403 和 0.044。 综上所述,该实验结果验证了 ADRFC 方法在有输入约束和干扰的 MAS 编队控制任务中的有效性和优越性。
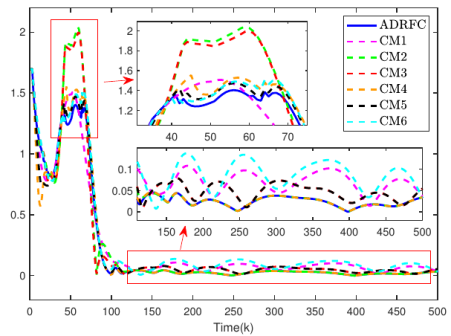
图5:编队误差Ef
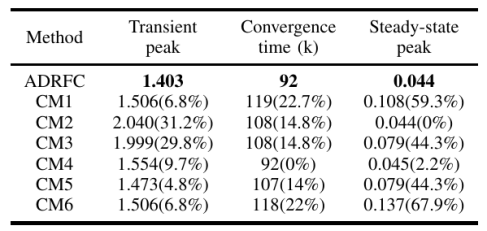
表1:性能比较结果
综上所述,本文为输入约束和扰动下的 MAS 编队控制任务提供了一种 ADRFC 方法。 通过 DIE 可以获得精确的误差状态估计和扰动估计。此外,本文还提出了一种 IDMPC 方法,并给出了严格的理论证明。与大多数现有方法相比,该方法将干扰抑制技术纳入了编队控制器的设计过程,并采用了最大终端约束集和最小终端惩罚矩阵的设计标准。这些改进使控制器能够在输入约束和干扰条件下完成 MAS 的路径跟踪和编队同步任务。最后,在 MAS 实验平台上演示了所提方法的有效性和优越性。